
Fire-Fighting Rules
|
The main challenge of this contest is to build an autonomous computer-controlled robot that can find its way through an arena that represents a model house, find a lit candle that represents a fire in the house, and extinguish the fire in the shortest time. This task simulates the real-world operation of an autonomous robot performing a fire protection function in a real house. The goal of the contest is to advance robot technology and knowledge while using robotics as an educational tool.
2. DIMENSIONS AND SPECIFICATIONS
The goal of the contest is to make a robot that can operate successfully in the real world, not just in the laboratory. Such a robot must be able to operate successfully where there is uncertainty and imprecision. Therefore, the dimensions and specifications listed in the rules are not exactly what will be encountered at the contest and they are provided as general aids. However, the size limits on robots are absolute and will be enforced by the judges.
SENIOR - RoboGames uses the the 2007 Senior Division rules with the 2007 Standard Arena. Senior Division teams may choose operating modes from the Basic Level Operating Modes and the Standard Level Operating Modes (same modes as the standard level High School category).
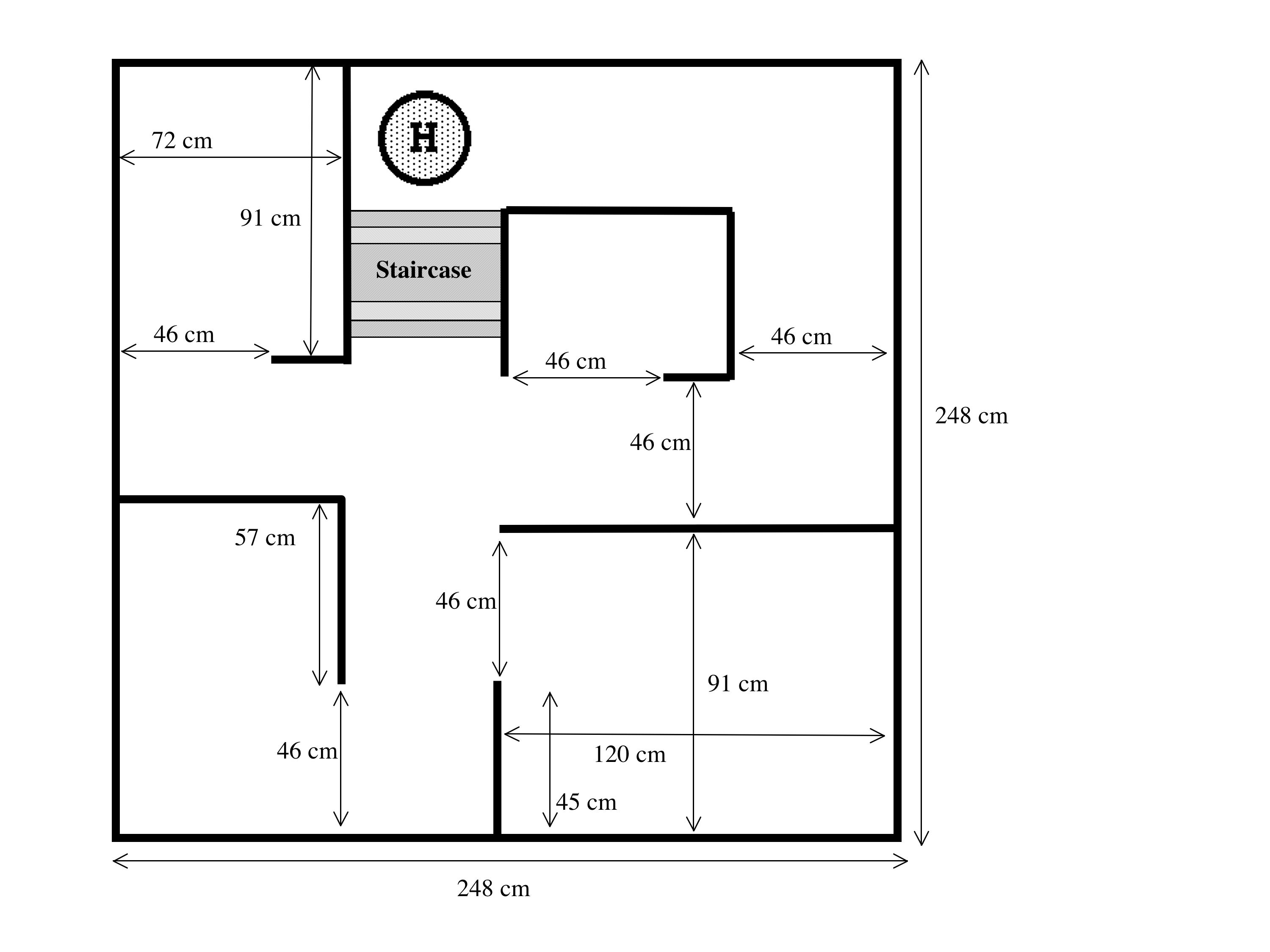
4. THE HOUSE FLOOR PLAN STRUCTURE AND FEATURES
The Standard Arena Layout represents a decorated home, a more realistic fire-fighting environment. The Standard Arena and the Basic Level Arena have the same dimensions and it is straightforward to transform a single arena from Basic Level to Standard Level and vice-versa. The differences between the Standard Arena and the Entry Level Arena are listed below.
{kind=link}
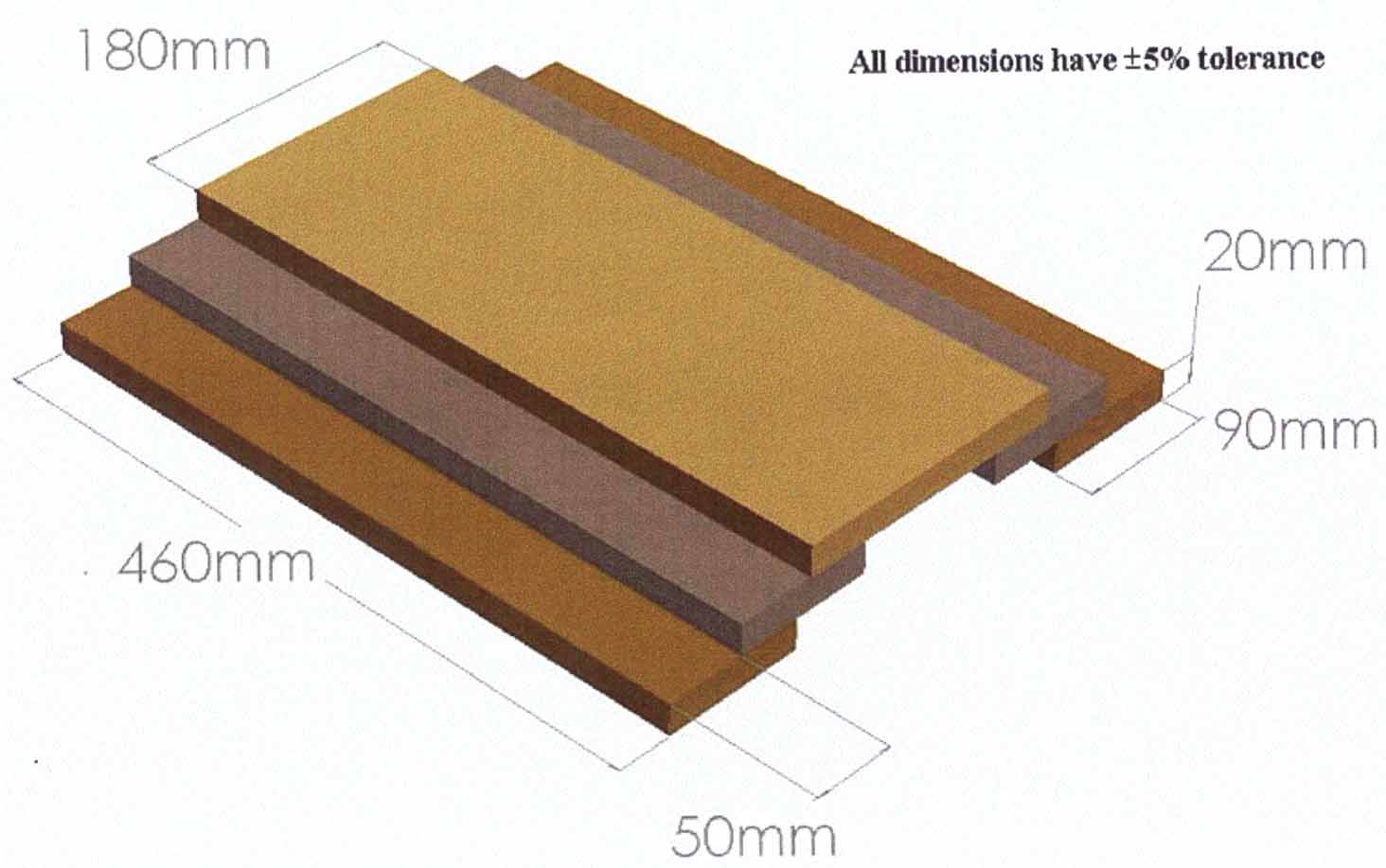
- There is a staircase in the Standard Arena. See Staircase. The staircase is a fixed feature of the Standard Arena Layout and will not be removed.
- Rugs will be placed in some or all of the rooms and hallways. There will be no shag rugs.
- Wall hangings, including pictures, tapestries, and/or mirrors, will be hung from the walls of rooms and hallways. These will not protrude more than 1 cm from the wall.
- A mirror will not be placed in the room where the candle is located but may be placed anywhere else in the arena.
- Small household objects (clutter) may be placed in the arena. The Clutter Operating Mode may be elected (time multiplier = 0.8) in the High School Standard Level and Senior Division.
- As noted in the arena floor plans, all hallways and doorways to room will be approximately 46 cm wide. There will not be a door in the doorways, just a 46 cm opening. There will be a white tape, approximately 2.5 cm wide, stuck to the floor across each doorway to indicate room entrances. The carpeting will not cover up the white tape. However the floor coverings may be light in color.
- Some robots may use foam, powder or other substances to attack the candle flame. Our best efforts will be made to clean up after each robot. Unless you are operating in the Uneven Floor mode (see Operating Modes, Section 18 below), the floor will be level (except for the staircase).
- The robot will start at the Home Circle location marked by the H in a circle on the arena floor plan. The Home Circle will be a solid white circle (without the H) on the floor. The 30 cm diameter white Home Circle will be roughly centered in the hallway. Robots may also use any placement fixtures if they help the robot initially align itself in the Home Circle. The robot must start within the Home Circle, but once started, it can go in any direction desired.
{kind=link}
Contestants will be given time on the contest days to take ambient light level readings to calibrate their robot. Once set on Saturday, the lighting in the contest area will not be changed to suit individual competitors. Part of the challenge of the contest is to make a robot that can operate in real world situations and that includes inconsistent lighting, shadows, glare, etc. Many sensors used by fire-fighting robots are thrown off by stray light sources including IR sources and UV sources present in gymnasium lights. Participants are urged to devise shades, covers, and other means to reduce the effects of stray sources.
Once turned on, the robot must be autonomous--self-controlled without any human intervention. That is, they are to be computer controlled and not manually controlled devices.
A robot may bump into or touch the walls of the arena as it travels, but it cannot mark, dislodge or damage the walls in doing so. There will not be a penalty for touching a wall, but there is a penalty for moving along the wall while in contact with it. The robot cannot leave anything behind as it travels through the arena. It cannot make any marks on the floor of the arena that aid in navigation as it travels. Any robot that deliberately, in the judges' opinion, damages the contest arena (including the walls) will be disqualified. This does not include any accidental marks or scratches made in moving around.
The robot must, in the opinion of the judges, have found the candle before it attempts to put it out. For example, the robot cannot just flood the arena structure with CO2 thereby putting the candle out by accident.
The robot must not use any destructive or dangerous methods to put out the candle. It may use such substances as water, air, CO2, etc., but any method or material that is dangerous or will damage the arena is prohibited. Halon is not allowed because it is harmful to the environment.
It will be permissible to put out the candle by blowing air or other oxygen-bearing gas. However, this is not a practical method of extinguishing a fire in the real world. So, robots that do not use air streams to blow out the candle will receive a 15% time reduction.
A penalty is given to robots that touch a lit candle. Such penalty touches can be made by the robot itself or by one or more of the robot's sensors. (See Penalties, section #20)
The robot must come within 30 cm of the candle before it attempts to extinguish the flame. There will be a white 30 cm radius solid circle (or circle segment, if a wall is in the way) on the floor around the candle and the robot must have some part of its body over the circle before it puts out the candle. The candle will be placed in the center of the circle.
Robot must be able to fit in a box 31 cm long by 31 cm wide by 27 cm high. If the robot has feelers to sense an object or wall, the feelers will be counted as part of the robot's total dimensions. The robot cannot separate into multiple parts and must never extend itself beyond the 31 cm allowed. (Separating robots are allowed in the Expert Division.)
Note that an additional constraint on the robot height is imposed on robots that run in the Standard Level Arena and go up and down the staircase. Since no part of the robot may exceed the height of the wall, the height of these robots is limited by the available vertical space; i.e. the minimal wall height (27 cm) less the peak height of the stairs (6 cm), or 21 cm.
Contestants may add a flag, hat or other purely decorative, non-functional item/s to the robot as long as the item has absolutely no effect on the operation of the robot.
There are no restrictions on the weight of the robot.
10. ROBOT CONSTRUCTION MATERIALS
There are no restrictions on the types of materials used in the construction of the robot.
The candle flame will be from 15 cm to 20 cm above the nominal floor level. The candle thickness normally will be between 2 cm and 3 cm. The exact height and size of the flame will change throughout the contest depending upon the condition of candle and its surroundings. The robot is required to find the candle no matter what the size of the flame is at that particular moment.
The candle will be placed at random in one of the rooms in the arena. The candle has an equal chance of being in any of the 4 rooms in each of the robot's 3 trials. It is possible for the candle to be in the same room on two of the robot's three runs. If it happens that the candle is placed in the same room for both the 1st and 2nd trials, then the contest officials will make sure that it is a different room for the third and last trial. Thus every robot will have the candle in at least 2 rooms and possibly 3, during its 3 trials.
The candle will not be placed in a hallway, but it might be placed just inside a doorway of a room. The candle circle will not touch the doorway line and this means that the front of the robot will be able to move at least 33 cm into the room before it encounters the candle.
The contestants cannot measure or touch the candle before it is used. Violation will result in immediate disqualification from the competition of the team and the robot.
The candle will be mounted on a small wooden base painted semi-gloss yellow. This base is used to help keep the candle from tipping over easily, but it will be possible to knock the candle over by bumping into it (which you don't want to do - see Penalties, section #20).
There is no restriction on the type of sensors that can be used as long as they do not violate any of the other rules or regulations. Robots that use laser-based devices must take measures to prevent eye damage to team members and to observers. If effective safety measures have not been taken, in the opinion of the qualification judges, the robot will not be allowed to qualify for the competition. The judges may require the team to remove the laser device from the robot.
Contestants are not allowed to place any markers, beacons or reflectors on the walls or floors to aid in the robot's navigation.
Robot builders should be aware that many cameras transmit infrared light as part of their automatic focusing systems. Ambient lighting in the contest room may also be a source of IR, visible and UV light. During the course of the contest, sunlight may come into the contest room through open outside doors. The sunlight will not shine directly on the arenas, but may be detectable by very sensitive sensors. During the course of the contest, judges at other arenas may be lighting candles or lighters. These incidental flames will be above the arena and further away than the candle, but still may be detectable by an undiscriminating sensor. In setting up the arena, contest officials may put their arms into the arena and some very sensitive sensors may mistake that IR emission as the flame. If a robot uses light sensors to find the candle or detect walls or furniture, it is the robot builder's responsibility to design their robot to prevent these and other unintended UV, visible and IR sources from interfering with its operation. Part of the challenge of this contest is to design a robot that can find the candle flame and ignore everything else.
The maximum electrical requirements for any system needing electricity at the arena will be 10 amps at 120 VAC, 60 Hz.
If the robot is connected to an external computer system for instructions and/or power make sure that the cable is long enough for the robot to get to all areas of the arena. If a contestant wants to hold the cable above the walls while the robot runs, they can, but if during the trial, in the opinion of the judges, they use the cable to assist the robot, then that trial will be ended with no score.
The robots will be assigned numbers to determine the order in which they will compete in the contest. Each robot will make a trial run in the arena in the order in which it is assigned. The robots will compete consecutively and when everyone is done with their first attempt the whole process will repeat for the second and third attempts.
Contestants will have time between their trials to make any adjustments, modifications or repairs to their robot, but once the robot before them has completed its trial, then they will have 1 minute to get their robot in the arena and started on its trial. There will be a special clock at each arena that the judges will start when they call for the next contestants to get ready. The robot must begin its trial before that clock reaches 1 minute. Any robot that is not ready to run after 1 minute will forfeit its chance at that trial. It may still compete in any other trials. Once assigned, the order of running will not be changed. If you are not ready, then you've missed your turn. The time between turns is undetermined and is controlled by how long the other competitors take to complete their trials.
The contestants will show a judge how to start the robot.
Once the robot is ready and the judge knows how to start it, the location of the candle, furniture, clutter and ramps, as appropriate, shall be determined. The judges will then place these objects in proper locations.
The contestants will show a judge how to actuate the robot. The judge will press whatever buttons are necessary to start the robot.
In order to achieve the contest objective of building a robot that can find and extinguish a fire in a house, finding the fire within a reasonable period of time is very important. The maximum time limit for a robot to find the candle will be 5 minutes. After 5 minutes the trial will be stopped. The maximum time for the robot to return to the Home Circle in the Return Trip mode will be 2 minutes. If in any trial, a robot gets stuck in a loop and performs the same movement 5 times in a row, that trial will be stopped. Any time the robot does not move at all for 30 seconds, the trial will be stopped. Stopping a trial run for any of the above reasons will have no impact on any of the other two trial runs that the robot has.
The robot with the lowest Final Score (FS) is the winner. The Final Score is calculated from a number of different factors, which are explained below. The scoring process is not as complicated as it might seem at first. It is intended to make the contest as realistic and as fair as possible. We are sorry if it reminds you of the federal tax code.
Note: A Mode Factor (MF) is associated with each of the operating modes described below in parts A and B. The mode factors, the actual run time (AT), the penalty points (PP), and room factors are used to calculate the Operating Score (OS) that we used to rank the robots.
Basic Level Operating Modes
Five Basic Operating Modes apply to Entry Level and Standard Level runs: Standard Mode, Tethered Mode, Sound Activation Mode, Return Trip Mode, and Extinguisher Mode. Each is associated with a mode factor that is used to adjust the Actual Time (AT).
Standard Mode: In the Standard Mode there are no wires connecting the robot to anything. The deciding factor in determining this mode is whether or not there is a tether connected to the robot. The Mode Factor for running in the Standard Mode is 1.0 (MF= 1.0)
Tethered Mode: In Tethered Mode the robot has a wire connecting it to either an external computer or a power supply. This Mode Factor is actually a penalty and increases the Operating Score. If the robot has its own on-board power supply and is controlled by either an on-board computer or a wireless link to another computer then it will not be in this mode and will not have an increased score. The Mode Factor for running in Tethered Mode is 1.2 (MF = 1.2).
Sound Activation Mode: In Sound Activation Mode the robot activates itself when it detects a sound signal between 3.0 kHz and 4.0 kHz. This action replaces manual pressing of start buttons on the robot or on a keyboard. The sound frequency is commonly used in smoke detectors and is created by piezo-electric devices available at Radio Shack and many other sources. Once turned on, the robot cannot start to move until the sound signal is activated. For example, if the robot starts to move before the sound signal is activated because it mistakenly detected ambient room noise (even the sound of another robot being activated in a different arena), then the trial will still count, but the robot will not get credit for operating in the Sound Mode. If the robot does not start to move in response to the sound signal it will not be given a second chance (i.e. another press of the sound button) to run in the sound mode for that trial. The sound signal device can be held at any distance from the robot that the contestants want and can continue for up to 5 seconds. The time for the trial will begin when the sound signal is created and not when the robot actually starts to move in response to that signal. There will be an official sound signal device at the contest, but contestants can bring and use their own sound devices operating within the proper frequency range. There will be a 5% reduction in score for a robot operating in this mode. The Operating Mode factor for running in the Sound Activation mode is 0.95 (OM = 0.95).
Return Trip Mode: In Return Trip Mode, the robot returns to the Home Circle after extinguishing the flame. It does not have to retrace its path in returning to the Home Circle or even take the most efficient route; it just must get back once it has put out the candle. It must leave that room and return to the Home Circle without entering any other rooms. The robot will be considered to have returned to the Home Circle if the robot stops with any part of the robot within the 30 cm white Home Circle. The robot does not have to be in the same position that it was when it started the run.
If a robot is entered to run in the Return Trip mode and finds and extinguishes the candle, but doesn't return to the Home Circle, the robot will not be disqualified. Instead the robot will receive the Operating Score with no Return Trip mode factor reduction.
The Actual Time (AT) score will include just the time the robot takes to find and extinguish the candle. It will not include the time for the robot's return trip to the Home Circle. Operating in Return Trip Mode will result in a 20% reduction in the score; the Operating Mode factor for running in the Return Trip mode is 0.8 (OM = 0.8).
Extinguisher Mode: Extinguishers that fan the flame would not be useful in the real world. Therefore, we assign a 15% decrease in time score (Operating Mode Factor OM = 0.85) to robots that put out the candle without blowing air. Robots that use an air stream of any kind will receive the Operating Mode Factor OM = 1.0).
Standard Level Operating Modes
In addition to the four basic level operating modes, the Standard Level offers an additional modes: Stairs Mode.
Stairs Mode: In order to encourage robots to go over the staircase, a time reduction will be applied to runs in which robots travel successfully over the staircase directly after leaving the home position at the start of the run. The Operating Mode factor for running in the Stairs mode is 0.9 (SF = 0.9).
19. STARTING THE ROBOT MANUALLY
If the robot is not being run in the Sound Mode then it must be started manually by a contest official.
External Computer: If the robot is using a tether connecting it to an external computer then the only key that can be pressed to start the robot is the "Enter" or "Return" key on the computer keyboard. A contest official will press the key. Any program that needs to be run must be loaded and ready to go before the robot is put in the arena. Once the robot is in place and the candle put into position, only the "Enter" or "Return" key can be pressed to start the robot. If for any reason the robot does not start, then that trial is over.
On-Board Computer: If the robot is using an internal computer, then there can be one and only one button that can be pressed to start the robot. This button must be positioned some place easy to see and get to on the robot and must be labeled as such, i.e., "START". "RUN", "GO", etc.
- Program Downloading: Any program necessary must be downloaded to the robot before it is put into the arena. Once that is done then the specific "start button" and only that "start button" can be pressed to start the robot. If for any reason the robot does not start, that trial is over.
The goal of this contest is to be as realistic as possible. Continuous contact of the robot with a wall for the purposes of navigation, or touching the candle, are not illegal but they are not good operating procedures for the real world (see A. and B. below). Penalty Points (PP) will be added to the Actual Time (AT) of any robot that exhibits these behaviors. Don't let these penalties scare you too much. These penalties are generally a small price to pay for a robot that manages to accomplish the task.
Continuous Contact With a Wall: Any robot that slides along a wall will have an additional penalty point 1 point (1 second) added to its time score for each 2 cm of wall it touches as it slides along. A robot may still touch a wall to orient itself. There are no penalties counted for hitting the wall on the return trip to the Home Circle.
Touching the candle: Any robot that touches the candle or its base with any part of its body or feeler, either deliberately or accidentally while the candle is lit, will have 50 penalty points (seconds) added to its Actual Time score each time the candle is hit. If the touch occurs as part of the actual extinguishing process (i.e. smothering the flame with a wet sponge) or after the candle is extinguished, there is no penalty. This touching refers only to a part of the robot's body and does not include any water, air or other material that the robot might use to extinguish the candle. (PP = 50)
In order to make the contest realistic and to encourage the creation of smart robots, we have deliberately added uncertainty into the contest. The robot does not know in which of the 4 rooms the candle has been placed. Sometimes a robot gets lucky and the candle is in the first room it searches and sometimes the candle is in the 4th room searched. The unfairness of this is that finding the candle in the 4th room you look in is a lot harder and takes longer than finding it in the 1st room you search. To reduce the impact of "luck" and give some credit to the more sophisticated robots that can search multiple rooms successfully, there will be a Room Factor involved in the scoring that will be multiplied by the Time Score to get the Operating Score. The more rooms a robot has to search before it finds the candle, the lower the Room Factor and thus the better the Operating Score.
If the candle is in the 1st room searched, the Room Factor will be 1.0
If the candle is in the 2nd room searched, the Room Factor will be 0.85
If the candle is in the 3rd room searched, the Room Factor will be 0.50
If the candle is in the 4th room searched, the Room Factor will be 0.35
It does not matter in which order the robot searches the rooms. The only thing that matters is how many rooms the robot has searched before it finds the candle.
After searching a room with a lit candle in it, there is no further reduction of room factor. This is true whether or not the robot extinguishes the candle. No matter how many more rooms the robot searches, there will be no effect on room factor.
Some robots have extremely sensitive sensors and can tell if the candle is in the room by merely looking in the doorway as it passes by. The robot does not have to enter a room to be considered to have searched it. Any robot going past a doorway that it has not gone past before will be considered to have searched that room. If the robot has already searched a room and then goes past the doorway again on its way to a different room, that room will not be counted twice.
For any run the judges measure the Actual Time (AT) of the run and they record the operating modes and penalties. The AT for each run is adjusted by adding the time penalties first to get the Time Score (TS) and by multiplying the TS by the mode factors.
Multiply the Operating Modes together to get the Mode Factor (MF). The Operating Mode factors are: Tethered=1.2, Sound = 0.95, Return=0.8, Extinguisher Mode (1.0 for robots that use air to blow out the candle, 0.85 otherwise), Furniture=0.75, Uneven Floor=0.8, Clutter = 0.8.
A. If none of the Operating Modes are used and the robot is running in the Standard Operation then MF=1.0
B. Record the Actual Time (AT) in seconds needed to put out the candle
C. Add all the Penalty Points (PP) together
Sliding along wall = 1 point per 2 cm
Touching the candle or base while the candle is lit = 50 points
D. Record the Room Factor (RF)
1st room = 1.0, 2nd room = 0.85, 3rd room = 0.50, 4th room = 0.35
E. Add the Actual Time to the Penalty Points to get the Time Score (TS)
TS = AT + PP
F. Multiply the Time Score, Room Factor and Mode Factor together to get the Operating Score (OS) for that trial.
OS = TS x RF x MF
G. The method for determining the winner in the Expert Division is given below in Section 25. First, second and third prizes in each division will be determined as follows. To receive a cash prize a robot must have at least two successful runs.
- Robots with three successful runs (candle extinguished) will form the highest group. The top three robots in that group will be ranked according to the sums of their three OS scores as determined in A-F above.
- If there are fewer than three robots in any division with three successful runs, the remainder of the top three prizes will be determined by ranking, according to finishing times, the robots that complete two successful runs.
Standard Level Scoring Example
1st Trial: Robot runs in Standard, Sound, Return, Stairs, and Clutter modes and takes 2 minutes and 17 seconds to extinguish the candle, in the second room visited, using a Carbon Dioxide device. It incurs no penalties on this run. The Operating Score for this trial is computed as follows:
i. Multiply the Operating Modes together to get the Mode Factor (MF) (Standard=1.0, Sound = 0.95, Return=0.8, Stairs = 0.9, Clutter = 0.8, Extinguisher = 0.85)
MF = Std x Snd x Rtn x SF x Clu x Ext = 1.0 x 0.95 x 0.8 x 0.8 x 0.9 x 0.85 = 0.46512
ii. Record the Actual Time (AT) in seconds needed to put out the candle
AT = 137
iii. Add all the Penalty Points (PP) together (PP =0)
iv. Record the Room Factor (RF) (2nd room = 0.85)
RF = 0.85
v. Add the Actual Time to the Penalty Points to get the Time Score (TS)
TS = AT + PP = 137 + 0 = 137
vi. Multiply the Time Score, Room Factor and Mode Factor together to get the Operating Score (OS)
OS = TS x RF x MF = 137 x 0.85 x 0.46512= 54.163224
2nd Trial: On its second trial the robot operates in the Standard, Sound, Return and Uneven Floor modes, takes 1 minute and 41 seconds to extinguish the candle, using a CO2 system, in the fourth room searched and accidentally bumps into the candle. It fails to return to start. Its Operating Score for that trial would be:
i. Multiply the Operating Modes together to get the Mode Factor (MF)
(Standard=1.0, Sound = 0.95, Return=1.0 and Uneven Floor=0.8, Extinguisher = 0.85)
MF = Std x Snd x Rtn x UnF x Ext = 1.0 x 0.95 x 1.0 x 0.8 x 0.85 = 0.646
ii. Record the Actual Time (AT) in seconds needed to put out the candle
AT = 101
iii. Add all the Penalty Points (PP) together (hitting candle = 50 points)
PP = 50
iv. Record the Room Factor (RF) (4th room = 0.35)
RF = 0.35
v. Add the Actual Time to the Penalty Points to get the Time Score (TS)
TS = AT + PP = 101 + 50 = 151
vi. Multiply the Time Score, Room Factor and Mode Factor together to get the Operating Score (OS)
OS = TS x RF x MF = 151 x 0.35 x 0.646 = 34.1411
3rd Trial: In the third trial the robot ran in Sound, Return, Clutter and Furniture modes. It extinguished the candle (with CO2) in the first room in 1 minute and 10 seconds, and did not make it back to the Home Circle.
i. Multiply the Operating Modes together to get the Mode Factor (MF) . The robot did not make it back to the Home Circle so it loses the Return mode reduction.
(Standard=1.0, Sound = 0.95, Clutter = 0.8, Extinguisher = 0.85, and Furniture = 0.75)
MF = Std x Snd x Clu x Frn x Ext = 1.0 x 0.95 x 0.8 x 0.85 x 0.75 = 0.4845
ii. Record the Actual Time (AT) in seconds needed to put out the candle
AT = 70
iii. Add all the Penalty Points (PP) together
PP = 0
iv. Record the Room Factor (RF) (1st room = 1.0)
RF = 1.0
v. Add the Actual Time to the Penalty Points to get the Time Score (TS)
TS = AT + PP = 70 + 0 = 70
vi. Multiply the Time Score, Room Factor and Mode Factor together to get the Operating Score (OS)
OS = TS x RF x MF = 70 x 1.0 x 0.4845 = 33.915
vii.
The robot had three successful runs and is placed in the highest finishing group. The three OS scores are added together to get the total OS score (TOS) for the robot: TOS = 60.18136 + 34.1411 + 33.915 = 128.23746
Note: The robot can choose different modes during each of its three trials. The candle and any furniture and/or clutter will be moved to different locations for each trial.
Scoring Example-Two successful runs, Standard Level
In this example the robot has the same first two (successful) trials as the robot in scoring example B above, but the robot fails to extinguish the candle on the third trial.
First trial: OS = 54.163224
Second Trial: OS = 34.1411
Third Trial: OS = 600 (score assigned for unsuccessful runs).
The robot is placed in the group with two successful runs, and the overall score is
OS = 54.163224+ 34.1411 + 600 = 688.304324
26. CHALLENGES OF JUDGES' RULINGS
The Chief Judge is the FINAL AND ABSOLUTE authority on the interpretation of all rules and decisions. Any contestant who wishes to challenge any ruling or scoring of the arena judges to the Chief Judge must do so BEFORE they leave the arena area. If a contestant has a problem or question about any decision the Arena Judges have made, they simply have to say that they wish to appeal this to the Chief Judge. The Chief Judge will then be called in to arbitrate the matter. Once the contestants have left the arena they may not appeal any decision or scoring of the Arena Judges.
The guiding principle of the Trinity College Fire-Fighting Home Robot Contest and its regional contests is that every robot entered is to be an original and unique design.
Thus an individual, team or school cannot enter multiple identical robots, except in the Expert Division where the identical robots comprise a single swarm. A team may enter more than one robot, but they must be significantly different from each other in at least some aspects of electronics, software and mechanics. The challenge of this contest is for every contestant or team to complete a unique robot of his or her own design.
(see the exception in Section D). The Saturday qualification period begins at 10 a.m. and ends promptly at 9 p.m. Robots may qualify at any time during that period. During the qualification period each robot will have a maximum of three chances to find and extinguish the candle, subject to the following rules:
A. The 3 qualification trials do not have to be run consecutively. A robot can come back after adjustments to try again.
B. Once a robot has successfully qualified by finding and extinguishing the candle, it does not have to complete any further trials. A robot only has to find the candle once to be qualified for the contest on Sunday.
C. If the robot cannot find and extinguish the candle once during its 3 qualification trials, then it has not qualified for the contest on Sunday.
D. First, Second and Third place winners of Official Regional Contests do not have to qualify, but the head of those Regional Contests must notify the Event Coordinator of their names by March 18th.
E. The candle will be placed in a room chosen by the contestant. The qualification judge will place the candle in a randomly chosen position in that room.
F. There is a five-minute limit on each qualification run. Any run that exceeds five minutes WILL BE RECORDED AS UNSUCCESSFUL AND will be counted as one of the three allowed runs.
G. The rules concerning not moving for 30 seconds or repeating the same movement 5 times will apply.
H. When you are ready to make a qualification trial, you will notify the qualification judges and they will give you a trial position. (For example: "There are 3 robots ahead of you in line and when they are done then you go.")
I. When it is your time to make your qualification trial you will have 1 minute to get set up and begin your run. If you can't begin within the 1 minute setup time, this particular qualification trial is over and it is counted as one of the three runs.
J. The qualification period will end at 9 pm sharp on Saturday. Any robots that have not qualified by that time FOR ANY REASON will not be qualified for the contest on Sunday. It is your responsibility to qualify before the qualification period ends.
K. The qualification trials will only take place on Saturday. There will be a short practice session on Sunday, but there will NOT be any qualification trials on Sunday.
L. Robots do not have to qualify in the same operating modes that they will run in on Sunday except that robots competing in the Expert Division will have to qualify in the special Expert Division arena and will be subject to the Expert Division rules.
The robot should be built, programmed and ready to run on arrival at the contest site. Practice time in the arenas will be limited due to the number of participants and because some of the arenas will be used all day Saturday for Qualification Trials. Practice time is intended to be used for calibrating sensors to the conditions in the gym and trouble shooting last minute problems. Don't expect to be able to do extensive code development and testing.
There will be arenas set aside for the Qualification Trials. The other arenas will be available for practice. However on Sunday morning before the contest, the qualifying competitors will be told which arenas they will actually compete in for which trial. They will have some limited time before the actual start of the contest on Sunday in which to make any final adjustments to their robots in this arena. It is very likely that robots in the High School and Senior divisions will run each trial in a different arena. We will strive to make the lighting and other factors the same for each arena, but there will be some variations. Your robot should be able to handle them. The robots should be prepared to run in any arena for any trial. The robots in the Expert, Walking and Junior divisions will only run in their single assigned arena and will not switch arenas.
The contest judges may stop any robot at any time if they feel that it is performing, or is about to perform, any action that is dangerous or hazardous to people or equipment. No robot is allowed to use any flammable or combustible processes.
Unused
In all matters of interpreting these rules before and during the contest and in any issues not covered by these rules, the decisions of the Contest Judging Committee will be final.
2005 RULES AND REGULATIONS
Courtesy of Trinity College
©2007 Copyright Trinity College
Printable version of this Page. | Subscribe to our mailing list!