LEGO Soccer
| Name of Event: | Lego Soccer |
| Robots per Event: | Two on Two |
| Length of Event: | Two 5-minute halves |
| Robot Weight Range: | 1 kg |
| Robot Dimensions: | 22 cm (8.7 inches) |
| Arena Specifications: | 122 cm x 183 cm (48" x 72") plus border |
| Robot Control: | Autonomous |
| Engineering Principles: | Computer Science, sensor integration, mechanical engineering, fuzzy logic |
| Event Summary: | Classic soccer game played with two LEGO Mindstorms robots to a side. The ball emits an infrared signal detected by all robots. "Striker" robots try to move the ball downfield to socre against the opponent goalie bot, while the opposing team tries to do the same. All robots are programmed to be autonomous. |
|
|
|
|
1. Playing Field and Ball
1.1 Floor
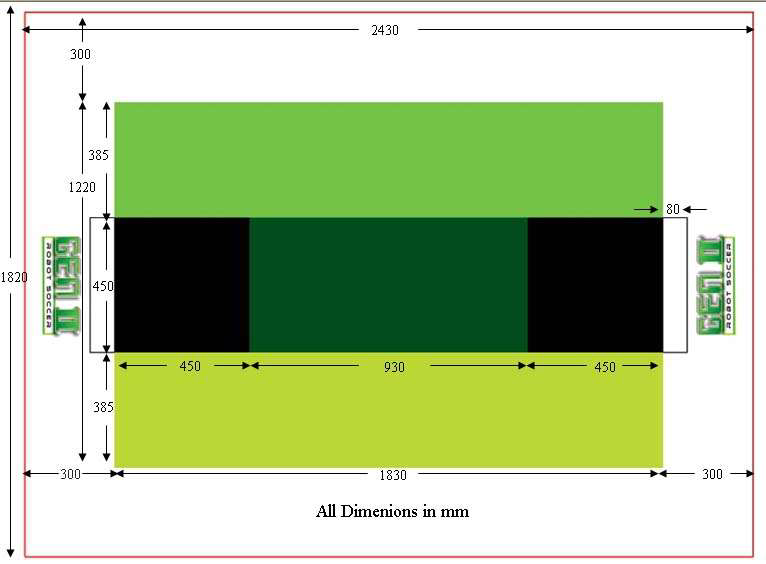
1.1.1 The playing field for the GEN II League is 122 cm by 183 cm. The field has white borders 30cm wide.
1.1.2. The floor of the playing field is covered with a printed vinyl, roll resistant mat.
1.1.3. The central playing area should be placed so that it is flat and level. All white borders, including the ends of the field are flat and inclined by raising the outside of the border by 1cm. (the incline should allow the ball to roll from the top of the incline to the penalty area line)
1.1.4. The field must be either placed on a carpet or felt base.
1.1.5. The field may be placed on a table or on the floor.
Hint: It is recommended that teams design their robots to cope with slight imperfections up to 5 mm on the surface and the incline.
1.2. Walls.
1.2.1. Matte black walls are placed all around the field, including behind the goals.
1.2.2. The walls are 8 cm high above the playing field.
1.2.3. The walls can be constructed of any material as they are not essential to game play.
1.3. Goals.
1.3.1. The width of each goal is 45 cm.
1.3.2. The back and sides of the goal interior are painted sky blue. The floor is white. The external sides of the goals are painted matte black.
1.3.3 The depth of each goal is 8cm.
1.3.4 Each goal will have a black cross bar 14cm above the playing surface
1.3.5 The surface within the goal area is flat and level(horizontal).
1.3.6 The side walls of the goals extend to the end wall to prevent ball from rolling behind the goals.
1.4. Neutral Zones.
1.4.1. There are two neutral zones, shown in white below, defined in the field.
1.4.2. They are defined as the line between the corners of the penalty boxes, running along the field on the boundaries of the green colour zones
1.5. Lighting and Magnetic Conditions
1.5.1. Teams must come prepared to calibrate their robots based on the lighting and magnetic conditions at the venue. Organizers will attempt to keep light levels as low as possible and locate soccer fields away from magnetic fields such as under floor wiring and metallic objects. However sometimes this cannot be avoided. It is recommended that teams design their robots to cope with variations in lighting and magnetic conditions, as these vary from venue to venue.
2. Ball.
2.1. Specification.
2.1.1. A well-balanced electronic ball diameter 7.5 - 8.0cm shall be used.
2.1.2. The ball will be used in pulsed mode in all leagues. EK RoboSoccer RCJ-05 ball operated in MODE A (pulsed), Hitechnic Infrared Electronic Ball(IRB 1005) in MODE A (1200 hz pulsed)
2.2. Ball Suppliers.
2.2.1. The official balls for all tournaments will be: Hitechnic Infrared Electronic Ball(IRB 1005) available from www.Hitechnic.com
3. Robots.
3.1. Dimensions.
3.1.1. Robots will be measured in an upright position and with all parts fully extended.
3.1.2. The upright robot must fit inside an upright 22cm diameter cylinder.
3.1.3. The robot height must be less than 22cm.
3.1.4. RoboGames events will run in one league: Novice League: not more than 1kg
3.1.5. While being inspected, each robot must be upright and at its maximum size; i.e., anything that protrudes from the robot must be fully extended. If a robot has a moving part that extends in two directions, it will need to be inspected with this part operating. The robot must be able to operate without touching the measuring cylinder.
3.2. Control.
3.2.1. Robots must be controlled autonomously.
3.2.2. Robots must be able to be started manually.
3.2.3. The use of remote of control any kind is not allowed.
3.2.4 Robots must be able to move in all directions.
3.2.5 Type 2 (blue tooth) communication between robots is acceptable as long as it does not interfere with the performance of other robots. Robots must have the ability to have their communication disabled at the request of the referee.
3.3. Marking/Coloring.
3.3.1. Competitors must mark or decorate their robots to identify them as belonging to the same team. These must not influence game play and will not be considered in the size restrictions.
3.3.2. Colors of robots and/or light transmitters must not interfere with the sensor readings of other robots.
3.4. Teams and Leagues.
3.4.1. All teams shall consist of no more than two (2) robots. Any substitution of extra robots during a tournament is forbidden and disqualification will result. Teams cannot enter the competition venue with more than two constructed robots.
3.5. Construction.
3.5.2 Robots can be bult and programmed as follows:
- Robots are to be constructed using strictly LEGO brand pieces, motors and sensors only.
- LEGO pieces can not be modified in any way.
- No other building materials can be used, including glue, tape, screws etc.
- Non LEGO compass sensors and Pulsed IR Light Sensors are the only after market sensors that can be used.
- Omni directional wheels are not permitted
- Cable ties or tape may be used to secure wires.
- Robots can only be programmed in any language.
The following combinations of motors and sensors are allowable For MindStorms users:
- MindStorms controller (1)
- motors (4)
- touch sensors (2)
- light sensors (2)
- lamp (1)
- ultrasonic sensor (1)
- HiTechnic compass sensor(1)
- HiTechnic IR seeker sensor V2 (1)
- Omni directional wheels are not permitted
3.5.3 Robots must have a handle for referees to easily pick them up. The handle will not be included in above measurements. Handles can be made from non LEGO components. Hint: Cable Ties make a strong lightweight handle.
3.6. Ball Capturing Zones and Movement
3.6.1. Ball Capturing Zones are defined as any internal space created when a straight edge is placed on the protruding points of a robot.
3.6.2. The ball cannot penetrate the Ball Capturing Zone by more than 3cm.
3.6.3. A robot cannot "hold" a ball. Hint: Holding a ball means taking a full control of the ball by removing all of its degrees of freedom. For example, this would mean fixing a ball to the robot's body, surrounding a ball using the robot's body to prevent access by others, encircling the ball or somehow trapping the ball with any part of the robot's body. If a ball stops rolling while a robot is moving ,or a ball does not rebound when rolled into a robot, it is a good indication that the ball is trapped.
3.6.4. The ball cannot be held underneath a robot. i.e., no part of a robot can protrude over more than half of the ball's diameter.
3.6.5. The ball must be visible and other players must be able to access the ball at all times.
3.6.6, The only exception to rule 3.6.3 is the use of a rotating drum that imparts dynamic back spin on the ball to keep the ball on its surface. This is called a "dribbler".
3.6.7. A dribbler must comply with Rule 3.6.2 and 3.6.4. The 3cm is measured from the contact point of the dribbler on the ball.
3.7. Goalies
3.7.1. If a goalie is used, it cannot limit its movement to a single direction on the field. It must be programmed to move in all directions.
3.7.2. The goalie must respond to the ball in a forward direction in an attempt to intercept the ball ahead of the goal. If required, its movement should be able to take some part of the robot outside of the penalty box (45 cm from goal).
Hint: The goalie cannot respond sideways and followed by a forward movement.
3.7.3. Failure to respond to the ball with forward movement down the field will result in the robot being classified as "Damaged." (Section 4.7)
3.8. Kickers, Batteries and Robot Power
3.8.1. If a robot damages a ball or the field, it will be removed from play and receive a time penalty as damaged robots. A yellow warning sticker will be placed on the robot/s and the referee will record the infringement on the score card.
3.8.2 In the event of two colliding robots damaging a ball, both robots will be removed and given a yellow sticker. If the referee considers one robot to be significantly more aggressive than the other, they can choose to remove that robot from play.
3.8.3. Adjustments must be made to the robot/s to prevent this from re-ocurring.
3.8.4. If a robot infringes again during the tournament, it will be disqualified from the tournament.
If a robot has the power to damage an officially accepted RoboGames Soccer ball(See 3.2.1 and 3.2.2), it is a strong indication that the robot has been built with excessive power and the intention to damage other robots. The robot has not been built with the ideals of RoboGames and fair competition in mind, so the tournament committee has every right to remove that robot from the competition.
3.8.5 If a robot has an electronic solenoid kicker, its voltage must be limited to the OH&S Standard Safe Voltage of 70V.
3.8.6 Due to safety reasons, Lithium Polymer batteries can only be used in conjunction with commercially produced, dedicated balanced Lithium Polymer battery chargers and fireproof charging bags. These batteries can explode due to incorrect recharging and discharging(check manufacturers specs), or if they are damaged.
4. Game Play.
4.1 Pre-game setup.
4.1.1. Organizers will provide access to the competition area for calibration and testing prior to the competition and according to a schedule that will be made available at the start of the event.
4.1.2. Organizers will make every effort to allow at least 10 minutes of setup time before each game.
4.1.3 This time is also for teams to express any concerns about the legality of opposing robots.
4.2 Length of Game.
4.2.1. The game will consist of two 10-minute halves. Some competitions may choose to run 5 minute halves at the discretion of the tournament organizing committee.
4.2.2. There will be a 5-minute break in between the halves.
4.2.3. The game clock will run for the duration of the game (two 10-minutes halves), without stopping (except as noted in Referees time Out in Section 4.9.4).
4.2.4. Teams can be penalized one goal per minute at the referee's discretion if they are late.
4.2.5. If a team does not report within 5 minutes of the game start, they will forfeit the game and the winning team awarded a 5-0 score line.
4.3 Start of Game.
4.3.1. At the start of the first half of the game, the referee will toss a coin and the team first mentioned in the draw shall call the coin while it is in the air.
4.3.2. The winner of the toss can choose either (a) which end to kick to, or (b) to kick off first.
4.3.3. The loser of the toss will decide the other option.
4.3.4. The team not kicking off in the first half of the game will kick off to begin the second half.
4.4 Kick-Offs.
4.4.1. Each half of the game begins with a kick-off.
4.4.2. All robots must be in located on their defensive side of the field.
4.4.3. Robots must not be running.
4.4.4. The ball is positioned by the referee in the center of the field.
4.4.5. The team kicking off places their robots on the field first. Robots cannot be moved once they have been placed.
4.4.6. All robots on the team not kicking off must have some part of the robot in the penalty box.
4.4.7. On the referee's command, all robots will be started immediately by human team members.
4.4.8 The robot kicking off must make a clear strike of the ball and it must roll clear the robot by at least 5 cm. A robot that does not have a kicker must visibly release the ball to a distance of 5cm and not continue to push the ball. An illegal kick off will result in the opposing side being granted the kick off.
4.4.9. Any robots that are started before the referee's command will be removed from the field for one minute.
4.5 Scoring.
4.5.1. A goal is scored when the whole of the ball crosses the goal line. This coincides with the ball striking the back wall of the goal. The referee will blow their whistle.
4.5.2. The ball must be free rolling to score a goal otherwise it will be deemed "pushed" by the referee and disallowed. In the event of a pushed goal, play will be not be stopped. The goal will not be allowed. The ball is placed on the nearest available neutral zone and play is continued. The robot must make a visible effort to kick or release the ball otherwise a goal will be deemed a "push". If no attempt is made to release the ball and it momentarily rolls free while in the control of a robot travelling towards goal, it will still be deemed a pushed goal.
4.5.3. The only exception to this is when a robot makes first contact with the ball at less than 20cm(approximately half the penalty area) from the goal. This includes contact being made by the ball or the attacking robot with another robot or the goal post.
4.5.4. A penalty goal will be awarded if a ball deemed to be traveling into the goal strikes a defensive robot that has some part of it over the goal line and in the "in goal" area. Robots should be built in a manner that the cross bar prevents them from going behind the goal line.
4.5.5. After a goal is scored, a kick-off will occur. The non-scoring team will be awarded the ball.
4.5.6. "Own goals" will be treated as a goal to the opposition, even if the ball is "pushed" into the goal.
4.6 Lack of Progress.
4.6.1. This occurs if the ball is stuck between multiple robots("forcing" situation) for a reasonable amount of time and has no chance of being freed or if no robot has any chance of locating the ball in a reasonable amount of time.
4.6.2 The referee will call "Lack of Progress" immediately when a robot is using greater power to "force" the ball past the opposition. If a referee is slow to remove the ball and a goal is scored as a direct result of a robot "forcing" the ball through, the goal will be disallowed and the ball placed on the nearest neutral zone.
4.6.3. In the case of Lack of Progress, the ball will be first moved to the nearest neutral zone. If this occurs again, the ball will be moved to the centre of the field.
4.6.4. When Lack of Progress is called, any robots stuck on other robots will be freed using minimal movement by the referee or team captains at the request of the referee.
4.7 Damaged Robots.
4.7.1. If a robot does not move and/or does not respond to the ball, it will be deemed damaged by the referee.
4.7.2. If a single robot remains in the in goal area for longer than 20 seconds, or is stuck against walls or goals, and shows no indication of returning to the playing area, it will be deemed damaged by the referee. Hint: A small reverse command in a program will usually free a stuck robot
4.7.3. The referee or players(with the referees permission following player request) may remove damaged robot(s) from the field.
4.7.4. A damaged robot must remain off the field for at least one minute. In a shortened (5 minute half) game the damaged robot can be replaced after a goal is scored.
4.7.5. A damaged robot must be repaired and may be returned with the referee's permission to the neutral zone that is closest to the goal they are defending and does not advantage that robot, eg facing the ball. Goalies may be returned to the area in front of the goal.
4.7.6. Play will continue during removal, repair and replacement. Note that the referee may choose to interrupt play if robot damage occurred because of a collision with an opposition robot.
4.7.7. If a robot turns over on its own accord, it will be treated as a damaged robot and removed. If the robot is tipped over after a collision with another robot, it can be righted by the referee and continue playing.
4.8. Ball Out Of Play
4.8.1 A ball is considered out of play if it strikes the outer wall or leaves the playing field.
4.8.2 After a ball is considered out of play, it will be moved to the nearest neutral zone to the disadvantage of the team of that last touched it. ie the neutral zone in the direction that the opposition are kicking.
4.9 Interruption of Game Play.
4.9.1. The situations listed in sections 4.6-4.8 may cause play to be interrupted, usually resulting in the movement of the ball to the nearest neutral zone while play is allowed to continue.
4.9.2. Play may also be stopped by the referee blowing a whistle but the game clock is not stopped, all at the discretion of the referee. All robots must be stopped immediately and returned to their position at the time the whistle was blown.
4.9.3. After a stoppage in play, play will resume on the referee's whistle and all robots are started simultaneously.
4.9.4 A referee may call "Referees Time Out" for field repair, situations such as in 4.7.7 or 4.11.3 or if the tournament referee is called for rule clarification. The referee can elect to stop the match clock if the stoppage is lengthy.
4.10 Multiple Defense .
4.10.1. Multiple Defense occurs if more than one robot from the defending side enters the penalty area and substantially affects the game.
4.10.2. For a "Multiple Defense", the robot having the least influence on play is moved to the centre of field. In the case where a goalie is involved, the other player will be moved.
4.11 Fouls.
4.11.1. If a robot utilizes a device or an action which continuously attacks or charges a robot not in possession of the ball, the referee will call "Foul". The team captain must then remove the robot from the playing field for at least one minute and correct the problem; play will continue (as in 4.7 "Damaged Robots").
4.11.2. If the robot continues to Foul, it will be permanently removed from the game, a yellow warning sticker will be placed on the robot/s and the referee will record the infringement on the score card.
4.11.3 If a robot is damaged by a foul, the referee will stop the game and stop the clock for up to 2 minutes while repairs are made. (See Referee's Time Out Section 4.9.4)
4.11.4 If a robot is removed from two games for "fouling", it will be disqualified from the tournament.
4.12 Free Kicks
There are no free kicks.
4.13 Penalty Kicks.
There are no penalty kicks.
4.14 Offside.
There are no offside rules.
4.15 Humans.
4.15.1. In general, movement of robots by humans is not acceptable.
4.15.2. Humans can only move robots at the instruction of the referee.
4.15.3. Before the start of each match, teams should designate one human who will act as "Captain", and be allowed to place, remove and replace robots during the game, based on the stated rules and as directed by the referee.
4.15.4. Other team members may start one robot, but after this, they are not allowed within the vicinity of the playing field. They are to remain at least one metre from the field while the ball is in play, unless otherwise directed by the referee.
5. Conflict Resolution.
5.1 Referee.
5.1.1. During game play, the referee's decisions are final. Any argument with a referees decision will result in a Yellow Warning Card. If argument continues, the referee will give a Red Card resulting in immediate forfeit of the game.
5.1.2. If Team Captains are satisfied with the result of a game, they are to sign the score sheet at the conclusion of game play.
5.1.3. Any protest after the game should only be if the scoring is believed to be incorrect. Or if a game result is in doubt. After signing the score sheet, no protests can be lodged.
5.2 Rule clarification.
5.2.1. Rule clarification may be made by members of the RoboGames Australia Technical Committee.
5.2.2. If a rule clarification is needed, the referee should stop the game immediately, call referees time out (Section 4.9.4), stop the clock and confirm the ruling before continuing with the game.
5.3. Special Circumstances.
5.3.1 Specific modifications to the rules to allow for special circumstances, such as unforeseen problems and/or capabilities of a team's robots, may be agreed to at the time of the tournament, provided a majority of the contestants agree.
6. Inspection.
6.1 Scrutineering.
6.1.1. All robots will be examined by a panel of referees before the start of each day of the tournament to ensure that the robots meet all constraints described in Section 3.
6.1.2. It is the responsibility of teams to have their robots re-inspected if their robots are not passed at scrutineering or have been modified at any time during the tournament.
6.1.3. Any violations of the inspection rules will prevent that robot from competing until modifications are effected.
6.1.4. Modifications must be made within the time schedule of the tournament and teams must not delay game play while making modifications.
6.1.5. If a robot fails to meet all specifications (even with modification), the robot will be disqualified for that game (but not the tournament).
6.2 Contestants.
6.2.1. Contestants will be asked to explain the operation of their robots in order to verify that the construction and the programming of the robot is their own work.
6.2.2. Contestants will be asked questions about their preparation efforts, and they will be requested to answer surveys and participate in video-taped interviews for research purposes.
6.2.3. Commercial kits may be used but must be substantially modified by the Contestants.
6.2.4. Proof of a full understanding of the program must be shown.
6.2.5. It is expected that tournament organizers will conduct verification interviews prior to the finals of all events.
6.2.6. If there is excessive mentor assistance or the work on the robots is not substantially original work by the Contestants, then the team will be disqualified from the tournament.
7. Code of Conduct.
7.1. Fair Play.
7.1.1. Robots that cause deliberate interference and repeated damage to structurally sound robots during normal game play will be disqualified (See Section 4.11(Fouls)).
7.1.2. Robots that cause damage to the field or the ball during normal game play will be disqualified from the tournament (see Section 3.8).
7.1.3. Humans that cause deliberate interference with any robots or damage to the field or the ball will be disqualified from the tournament.
7.1.4. It is expected that the aim of all teams is to play a fair and clean game of robot soccer.
It is expected that all robots will be built with Rules 3.8 and 4.11 in mind.
If robots are built to the upper limits of power and weight, they must anticipate the possibility of damaging other robots or the ball. Officially endorsed RoboGames balls have been tested for robustness and are not damaged in normal RoboGames game play.
7.2. Behavior.
7.2.1. All movement and behavior is to be of a subdued nature within the tournament venue.
7.2.2. Competitors are not to enter setup areas of other leagues or other teams, unless expressly invited to do so by team members.
7.2.3. Participants who misbehave may be asked to leave the building and risk being disqualified from the tournament.
7.2.4. These rules will be enforced at the discretion of the referees, officials, conference organizers and local law enforcement authorities.
7.3. Mentors.
7.3.1. Mentors (teachers, parents, chaperones and other adult team-members) are not allowed in the student work area.
7.3.2. Sufficient seating will be supplied for Mentors to remain in a supervisory capacity around the student work area.
7.3.3. Mentors are not to repair robots or be involved in programming of student robots. Robots or computers should not need to leave the student work area during the day's game play.
7.3.4. Mentor interference with robots or referee decisions will result in a yellow card warning in the first instance. If this reoccurs, a red card will be awarded and the mentor will be asked to leave the venue.
7.4. Sharing.
7.4.1. An understanding that has been a part of world RoboCup Competitions is that any technological and curricular developments should be shared with other participants after the competition.
7.4.2. Any developments may be published on the RoboGames web site after the event.
7.4.3. This furthers the mission of RoboGames as an educational initiative.
7.4.4. Teams are encouraged to publish footage of highlights on YouTube using the tags RoboCup Junior Australia Soccer. Prizes may be awarded for the best clips at the discretion of the tournament organizers.
7.5. Spirit.
7.5.1. It is expected that all participants, Contestants and Mentors alike, will respect the RoboGames mission.
7.5.2. The referees and officials will act within the spirit of the event.
7.5.3. It is not whether you win or lose, but how much you learn that counts.